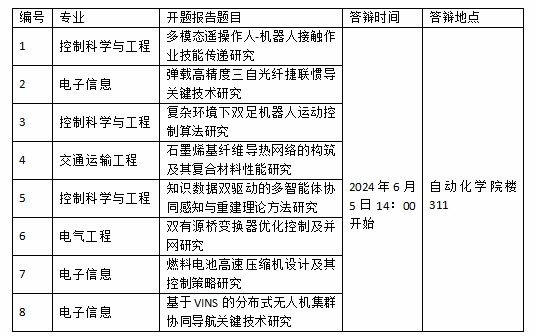
一、答辩总体安排
二、答辩简介
1:多模态遥操作人-机器人接触作业技能传递研究
本课题计划研究多模态遥操作人-机器人接触作业技能传递,利用基于穿戴式交互设备的遥操作平台,基于对主从端多模态信息的分析利用,对接触作业的任务分解、技能模型构建和技能泛化性开展研究,使机器人能够学习人类操作者的动作和策略,提升人机协作过程中技能传递的智能性和灵活性。
2:弹载高精度三自光纤捷联惯导关键技术研究
针对高精度三自光纤捷联惯导产品自身特点及目前存在的实际问题,从自标定、自对准、自检测三个方面入手研究适合于弹载三自光纤惯导产品的整套算法,主要研究抗晃动、无依托的对准算法,光纤陀螺启动特性的自补偿及系统对准过程算法补偿,载体发射前的测试流程改进等方面内容,以提高三自光纤惯导的使用精度。
3:复杂环境下双足机器人运动控制算法研究
针对双足机器人在复杂环境下的运动控制问题,即与外界交互的复杂性、工作场景的复杂性和非结构化地形的复杂性,提出一套双足机器人运动控制算法,使机器人面对各种外力干扰和不确定性因素时,能够实现稳定、抗干扰与柔顺性兼容的运动行为。
4:石墨烯基纤维导热网络的构筑及其复合材料性能研究
针对目前交通运输领域中新能源汽车对高效率散热的需求,以及填充型聚合物热界面材料存在的柔性差、导热通路单一、界面热阻高、导热填料取向度差等问题开展研究。课题以高性能可调控石墨烯纤维为基础,利用其湿法熔融特性及冷冻干燥等技术,制备一系列多形态石墨烯纤维导热网络(石墨烯纤维、织物、气凝胶)的热界面复合材料。通过各种分析表征手段探究石墨烯纤维作为热界面填料的导热机理,为交通运输中高效散热材料的设计提供理论和实验基础。
5:知识数据双驱动的多智能体协同感知与重建理论方法研究
针对多智能体协同感知与重建问题,通过深入分析和试验数据,提出一种结合感知能力和物理交互特性的多智能体协同重建方法,该方法旨在从不同的几何外形物体的最优视角进行动态对象的精确重建。计划通过设计针对感知和重建效果的奖励函数,以及强化学习的轨迹规划方法,来提高重建的一致性和准确性。此外,探讨在稀疏输入条件下使用神经辐射场(NeRF)技术的优化方法,结合高斯模型与运动场快速准确地重建动态物体。为了应对模拟环境与真实环境间的性能差异,引入虚实迁移技术,确保仿真算法在现实世界中的有效性。在多智能体系统的协同决策方面,结合分层强化学习、多智能体强化学习及动态环境强化学习设计决策策略。
6:双有源桥变换器优化控制及并网研究
针对双有源桥在优化控制问题中复杂性和准确性不能兼顾的问题,利用人工智能技术,通过人工神经网络对双有源桥建模,实现基于人工神经网络的双有源桥变换器优化控制。针对双有源桥在多模块协作中不同模块间电流不平衡问题,在人工神经网络模型控制方法下,提出一种双有源桥辅助电感参数识别方法,实现模块间输出电流的平衡。针对输出电流谐波的问题,研究输出电流谐波特性,提出一种在多模块双有源桥系统中的输出电流谐波补偿方法,提高系统电容和电池等部件的寿命。
7:燃料电池高速压缩机设计及其控制策略研究
本论文拟面向燃料电池汽车用空压机高速电机设计及无传感器控制技术进行研究,设计符合整体系统性能指标要求的高速电机,解决表贴式永磁同步电机在低速、零速时初始位置难以判断,对高速电机及其电控系统进行分析,对拟采取的滑膜控制算法进行研究,提出符合车用空压机要求的高速电机高精度、强鲁棒性的控制算法,以实现燃料电池车用压缩机的高性能协调控制。
8:基于VINS的分布式无人机集群协同导航关键技术研究
针对无人机集群在GPS拒止环境下如何开展灵活稳定的协同导航。在长期调研和试验数据分析的基础上,研究多种导航手段融合的协同导航算法。利用多源信息融合、非线性滤波估计、分布式优化等理论方法,从不同角度提升无人机集群的导航精度与稳定性。









